델타 로봇 통합 시스템
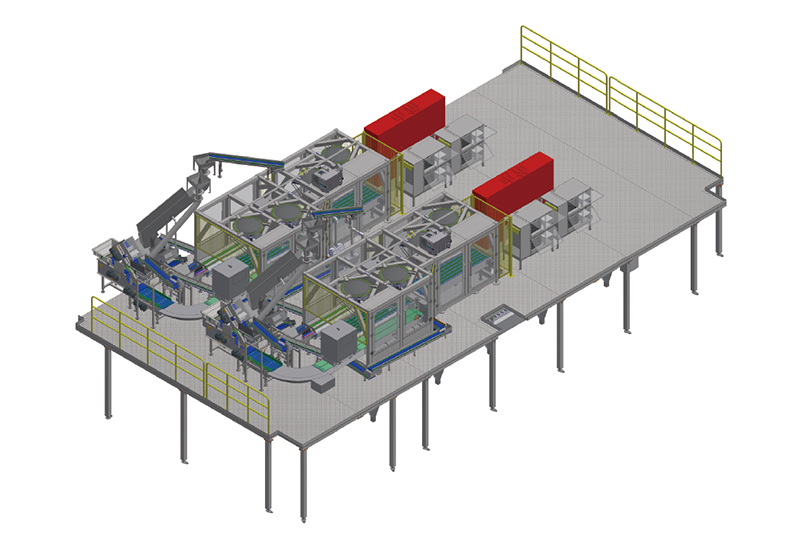
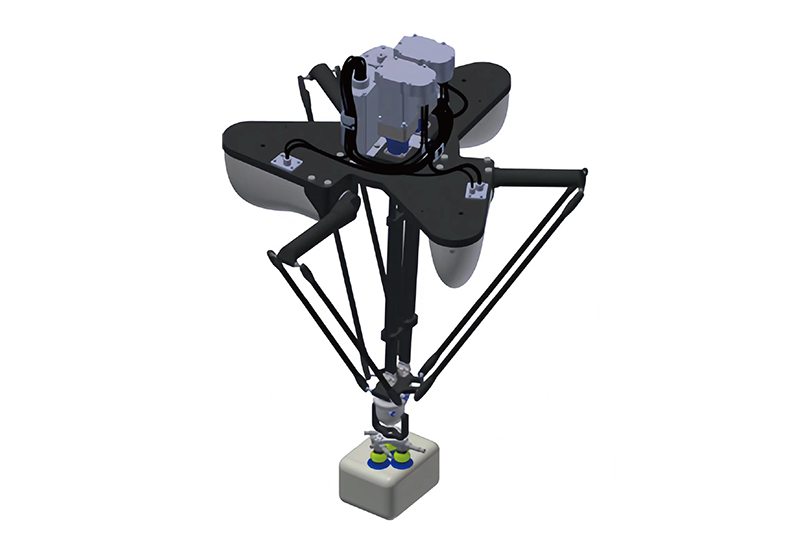
정렬되지 않은 내부 포장 제품은 창고에서 배출됩니다. 서보 언스크램블러에 의해 분류된 후, 시각 시스템이 제품 위치를 인식합니다. 케이스 포장 기계 작동 중 시각 시스템은 스파이더 로봇과 정보를 공유하고, 스파이더 로봇은 제품을 잡아 해당 외부 포장에 넣습니다.
애플리케이션
분유차, 당면, 인스턴트 라면 등 병, 컵, 통, 봉지 형태의 무질서한 내부 포장 제품을 분류, 식별, 포착하여 외부 포장 내부에 넣는 데 적합합니다.
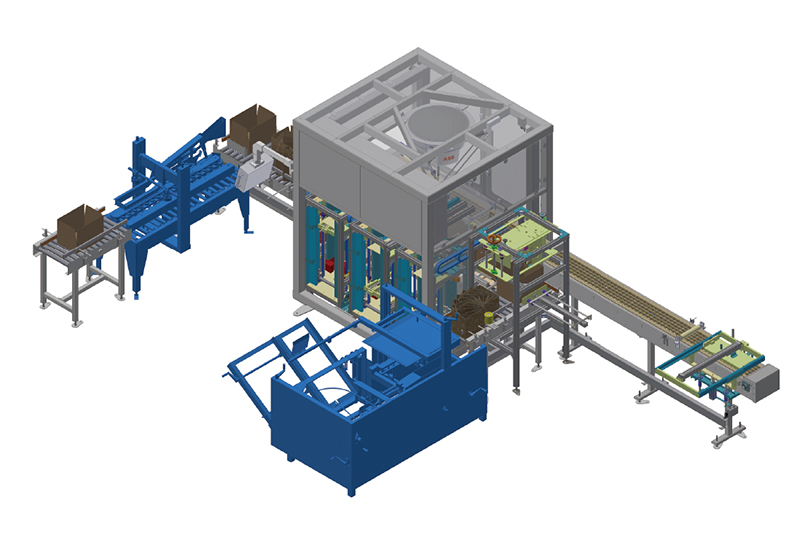
3D 도면


포장 라인
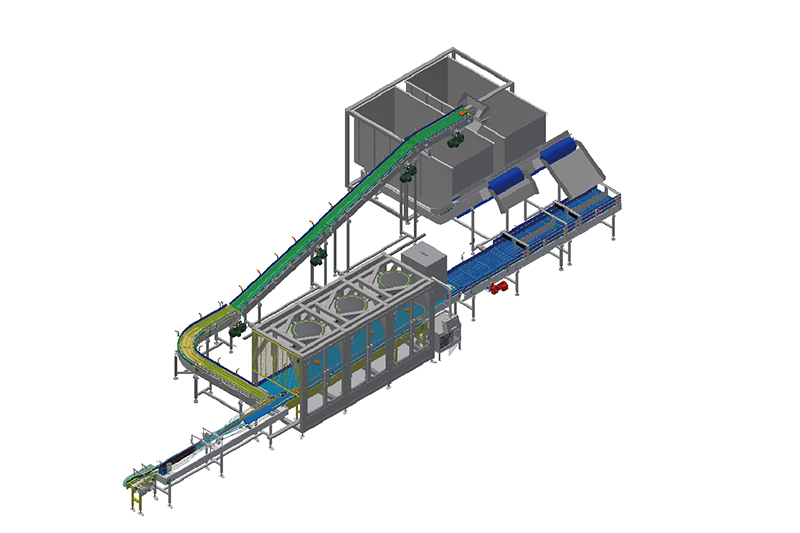
언스크램블러 라인

전기 구성
| PLC | 지멘스 |
| VFD | 댄포스 |
| 서보 모터 | 엘라우-지멘스 |
| 광전 센서 | 아픈 |
| 공압 부품 | 에스엠씨 |
| 터치스크린 | 지멘스 |
| 저전압 장치 | 슈나이더 |
| 단말기 | 피닉스 |
| 모터 | 꿰매다 |
기술적 매개변수
| 모델 | LI-RUM200 |
| 안정적인 속도 | 200개/분 |
| 전원 공급 장치 | 380 AC ±10%, 50HZ, 3PH+N+PE. |
더 많은 영상 보기
- 델타 로봇 분류, 공급, 언스크램블링 및 케이스 포장 라인






